Platform on civil engineering, underground infrastructure, energy, construction equipment & construction machinery
Van puntenwolk tot besluit
Bij het beoordelen van waterkeringen draait alles om de bestaande situatie. De relevante faalmechanismen van de kering worden beoordeeld op basis van de geometrie om vast te stellen of de kering aan de norm voldoet. In de praktijk raken waterkeringen vaak direct aan wegen, woningen en andere infrastructuur. Juist daar wordt het ingewikkeld: hoe breng je de situatie goed in beeld zonder het verkeer stil te leggen, de veiligheid in gevaar te brengen of wekenlang te meten? Ingenieursbureau Iv legt met een eigen geavanceerde scanauto de omgeving volledig vast, rijdend en zonder verstoring. Het resultaat is een nauwkeurige en complete 3D-registratie van het maaiveld, de bovengrondse infrastructuur en alle objecten in de omgeving, waarmee ontwerpers en beheerders direct inzicht krijgen en beter onderbouwde keuzes kunnen maken.
Wie aan dijkversterking denkt, ziet vaak zware machines en grote hoeveelheden grond voor zich. Maar het werk begint eerder. Lang voordat de schop de grond in gaat, draait het om inzicht: hoe ligt de dijk erbij, hoe sluit hij aan op zijn omgeving en waar zitten de kwetsbaarheden? Juist in die voorbereidende fase speelt het verzamelen van nauwkeurige omgevingsdata een belangrijke rol.
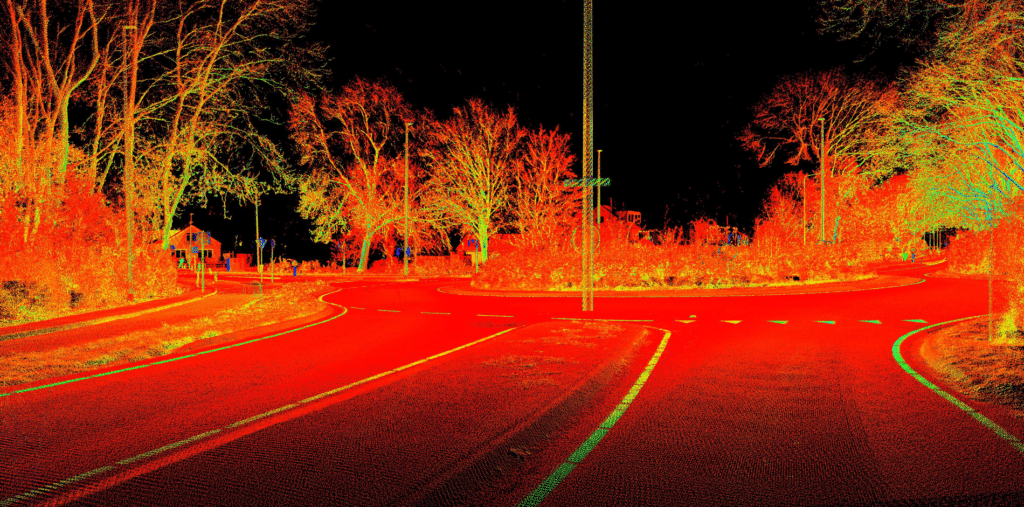
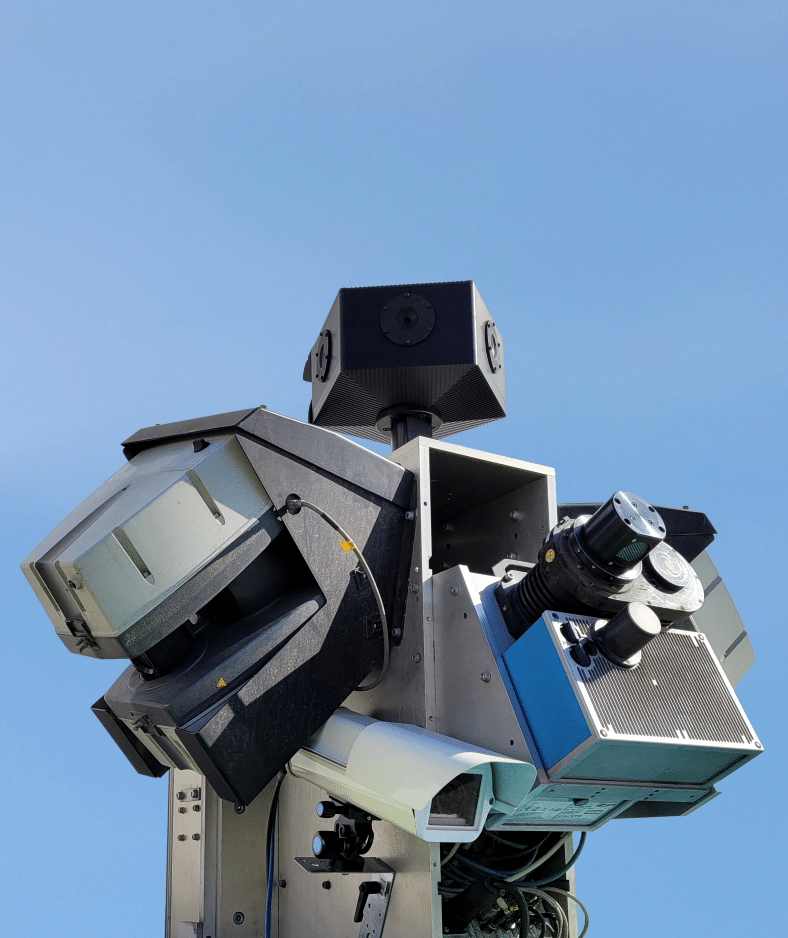
Traditioneel wordt die informatie verzameld via losse metingen, vanaf bestaande kaarten en met aanvullende onderzoeken. Dat levert veel informatie op, maar niet altijd een samenhangend beeld. Bovendien kan het nauwkeurig in kaart brengen van de omgeving een enorm grote en tijdrovende klus zijn. Vaak zijn voor het inmeten van de omgeving verkeersmaatregelen nodig. Dit is niet alleen hinderlijk voor het wegverkeer, maar werkt ook kostenverhogend. Om die reden wordt steeds vaker gekeken naar manieren om de bestaande situatie in één keer nauwkeurig, veilig en volledig in te winnen. Iv gebruikt hiervoor de zelfontwikkelde 3D-scanauto. Dit voertuig is uitgerust met geavanceerde 3D-laserscanners en camera’s die de omgeving tijdens het rijden tot op de millimeter nauwkeurig vastleggen. Het resultaat is een gedetailleerde puntenwolk, bestaande uit miljoenen laserpunten en een set 360-gradenbeelden, waarin de vorm en grootte van alle objecten zijn vastgelegd. Het voordeel zit niet alleen in de nauwkeurigheid, maar vooral in de volledigheid en veelzijdigheid van de data. Dat betekent dat vragen die later in het proces ontstaan, vaak beantwoord kunnen worden door de ingewonnen data vanachter een computer te raadplegen. Het buiten opnieuw meten is dan niet nodig.

Waterschap Amstel, Gooi en Vecht controleert periodiek de dijken in haar beheergebied. Wanneer een dijk niet hoog of stabiel genoeg blijkt, start een dijkverbeteringstraject. Een voorbeeld is de dijk langs het Zijdelveld, die de Noorder Legmeerpolder beschermt tegen hoog water uit de Uithoornse polder. Hier speelt de vraag: voldoet de waterkering aan de huidige normen?
De situatie is complex. Er ligt namelijk een rotonde die onderdeel uitmaakt van de waterkering. De vraag is niet alleen of de waterkering hier voldoet, maar vooral hoe? Ligt de kering op deze plek hoog genoeg? En als dat op de huidige lijn waar de waterkering ligt net niet het geval is, hoe biedt de bestaande ruimte dan mogelijkheden om de waterkering in te passen, zodat deze wél aan de norm voldoet? Om die vragen goed te kunnen beantwoorden, is de volledige rotonde en de directe omgeving vastgelegd met de 3D-scanauto van Iv. Dat gebeurde rijdend met het verkeer mee, op een drukke N-weg. Juist dat is een belangrijk voordeel: waar handmatig meten hier lastig en onveilig zou zijn, kan de scanauto zonder verkeersmaatregelen de hele situatie veilig en nauwkeurig vastleggen. Met minimale impact op het verkeer ontstaat zo een compleet driedimensionaal beeld van de weg, dijk en omgeving.
Het verzamelen van data is geen doel op zich. De waarde zit in wat ermee gebeurt. Omgevingsscans maken het mogelijk om sneller varianten te vergelijken, knelpunten te signaleren en de gevolgen van ingrepen beter te overzien. Ook richting de omgeving kan dat helpen. Visualisaties op basis van actuele data maken plannen inzichtelijker voor omwonenden en andere stakeholders.
Joost Assendelft, teamleider Geodata bij Iv, stond jaren geleden aan de basis van deze eerste scanauto van Nederland en is nog altijd nauw betrokken bij de verdere ontwikkeling ervan. Hij licht toe: “De puntenwolk van de 3D-laserscans biedt nauwkeurige x-, y- en z-coördinaten van objecten, waardoor de exacte locatie, vorm en afmetingen meetbaar zijn. Dit levert een gedetailleerd en betrouwbaar overzicht van de infrastructuur. Beheerders kunnen bijvoorbeeld direct zien of obstakels te dicht bij de weg staan of drempels en wegmarkeringen aan de normen voldoen, of wat de exacte doorrijhoogte van viaducten is.”
In plaats van meerdere inspecties voor wegen, verkeersborden, lichtmasten of groenbeheer, kan nu alles in één meting worden vastgelegd. “Dit betekent dat alle relevante gegevens direct beschikbaar zijn, zonder dat er voor elk afzonderlijk beheervraagstuk opnieuw veldwerk nodig is. Hierdoor kunnen beheer- en onderhoudsbeslissingen niet alleen sneller en efficiënter, maar vooral ook beter op elkaar afgestemd en beter onderbouwd worden genomen.”
Dijkverbeteringen zijn per definitie projecten van de lange adem. Beslissingen die vandaag worden genomen, werken jarenlang door. Dat maakt het des te belangrijker om die beslissingen te baseren op betrouwbare gegevens. De 3D-scanauto is daarbij erg waardevol.
Momenteel hebben we samen de bestaande situatie volledig in beeld gebracht. Op basis van deze nauwkeurige data verkennen we in de combinatie ACW, bestaande uit RPS, TAUW en Iv, de verschillende oplossingsrichtingen. Hiermee is een solide basis gelegd voor de vervolgstappen in het project, waarin we gericht werken aan het verbeteren van de waterveiligheid en het beperken van risico’s voor de omgeving.